|
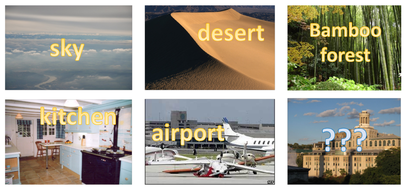
Spatial Pyramid Matching for
|
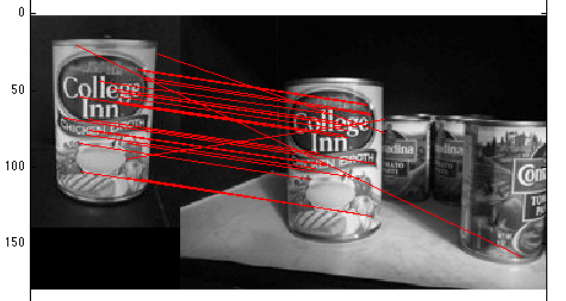
Keypoints - Detectors, Descriptors and MatchingKeypoint Detector
1.1 Gaussian Pyramid 1.2 The DoG Pyramid 1.3 Edge Suppression 1.4 Detecting Extrema 1.5 Putting it together BRIEF Descriptor 2.1 Creating a Set of BRIEF Tests 2.2 Compute the BRIEF Descriptor 2.3 Descriptor Matching 2.5 BRIEF and rotations |
|

|
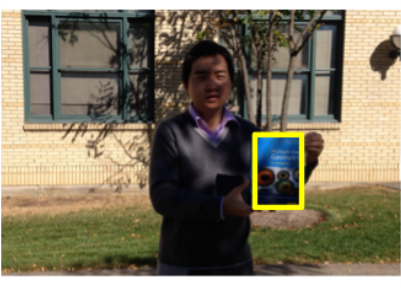
Homographies & RANSACA planar homography allows us to compute how a planar scene would look from second camera location, given only the first image. In fact, we can compute how images of the plane will look from any camera at any location without knowing any internal camera pa- rameters and without actually taking the pictures, all with the planar homography.
|
TrackingThis project consists of three parts. First, implement a simple Lucas-Kanade (LK) tracker with a fixed template. Second, generalize the LK tracker by taking into account large variation in appearance. In the last part, implement a motion subtraction method for tracking moving pixels in the scene.
All the three parts built upon the Lucas-Kanade tracking framework. |
|
|
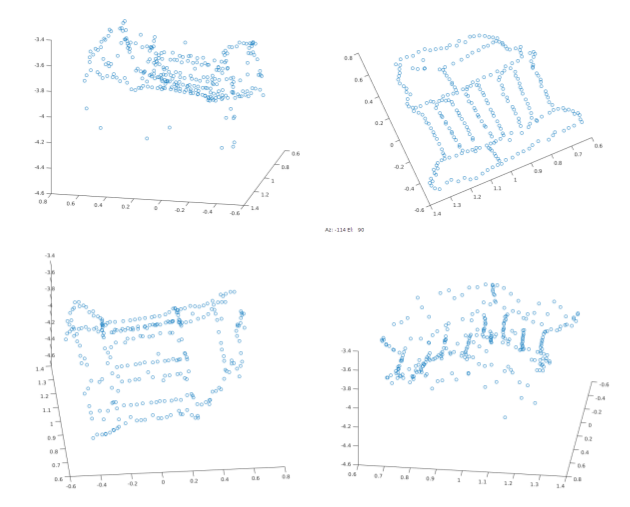
3D Reconstruction单击此处进行编辑.
|
Superpixels for Image SegmentationRepresenting an Image with Superpixels
|
|
